.svg)
Business opinion “Robot to Rely more on Tactile Information,†Sang-bae Kim on Cheetah-3
Opinion
CIO Bulletin
2018-07-10
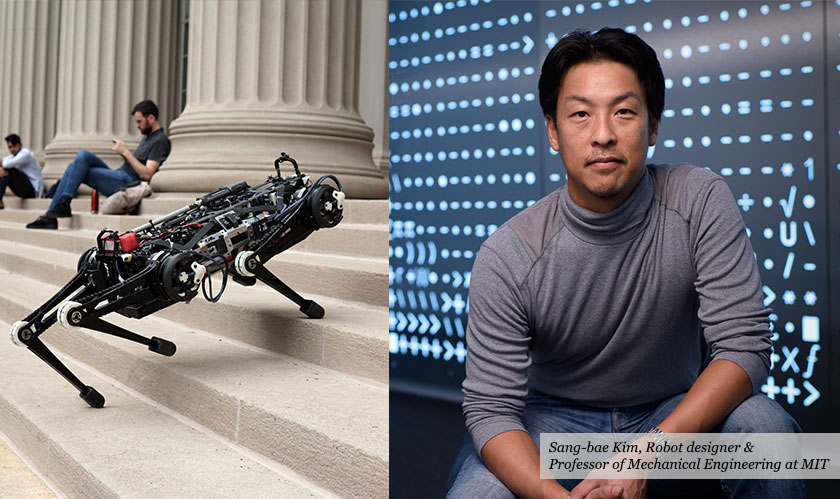
MIT’s Cheetah 3 robot can now run across terrains, climb stairs, and quickly regain balance from a jerk or a push. The 90-pound machine does all this without relying on any cameras or external environment sensors. The robot is simply “blind”. It feels its way through its surroundings – “blind locomotion”, like one makes it through a pitch-black room.
Sang-bae Kim, the Robot designer and Professor of Mechanical Engineering at MIT, says, “There are many unexpected behaviors the robot should be able to handle without relying too much on vision… Vision can be noisy, slightly inaccurate, and sometimes not available, and if you rely too much on vision, your robot has to be very accurate in position and eventually will be slow. So we want the robot to rely more on tactile information. That way, it can handle unexpected obstacles while moving fast.”
Researchers at MIT are all set to present the new and improved Cheetah 3 at the International Conference on Intelligent Robots, in Madrid. In addition to blind locomotion, the team will also demonstrate the Robot’s improved hardware and its cat-like flexible stretches in all directions.
As per Kim, in the next few years, the robot will carry-out tasks that are inaccessible or too dangerous for humans to execute. “Cheetah 3 is designed to do versatile tasks such as power plant inspection, which involves various terrain conditions including stairs, curbs, and obstacles on the ground… I think there are countless occasions where we [would] want to send robots to do simple tasks instead of humans. Dangerous, dirty, and difficult work can be done much more safely through remotely controlled robots.”
The algorithms that shape the Cheetah 3 are the contact-detection algorithm and a model-predictive control algorithm. According to Kim, “The contact detection algorithm will tell you, ‘this is the time to apply forces on the ground… But once you’re on the ground, now you need to calculate what kind of forces to apply so you can move the body in the right way.” He adds, “… predictive control that can apply the right forces on the ground, combined with this contact transition algorithm that makes each contact very quick and secure.”
“If humans close our eyes and make a step, we have a mental model for where the ground might be and can prepare for it. But we also rely on the feel of touch of the ground… The Robots are sort of doing the same thing by combining multiple [sources of] information to determine the transition time,” explains Kim.
Banking-and-finance
Artificial-intelligence
Travel-and-hospitality
Management-consulting
Banking-and-finance
Banking-and-finance
Food-and-beverage
Travel-and-hospitality
Food-and-beverage






























































 consultants ltd.jpg)













.jpg)